Project Description
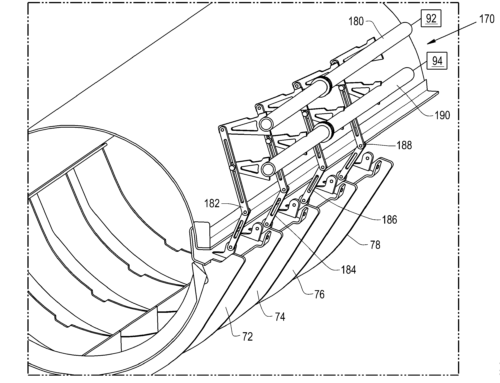
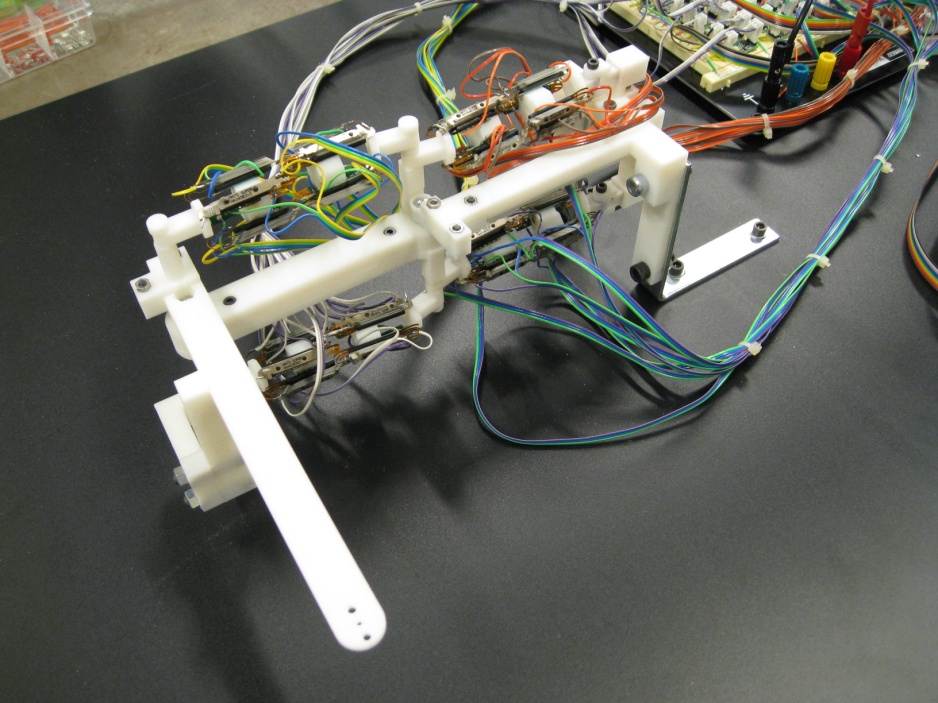
This prototype was designed and built for a cellular shape memory alloy muscle based robot. The design was implemented in two phases and programming was completed in LabVIEW. The design included the array system for the shape memory alloy cells, the 2DOF robot, and the electronic controller.
This project was part of a research and development focus on better understanding human muscles as actuators. The shape memory alloy cells behave similar to human muscle fibers. This is an ongoing field of study and has implications in mission critical actuator technology and control theory for actuator based prosthesis.
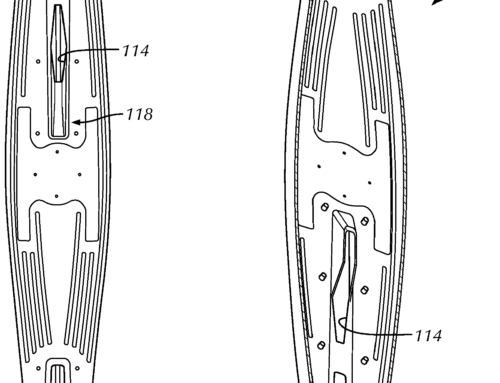
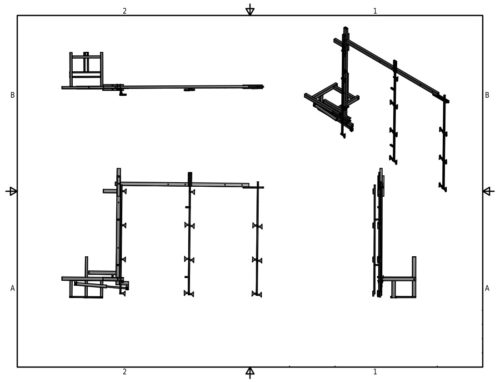
Sample of program and an actuator 3D model pictured below: